As the overall modeling of the Razorback project nears maturity, we’re starting to focus on some of the more detailed and nuanced areas of the model. For instance, let’s consider the kickstands. We know that they will be Pneumatic/Hydraulic, and we know that actuated stuff in sci-fi renditions must have hoses leading from the mechanism into the depths of the robot… it’s just cooler that way.
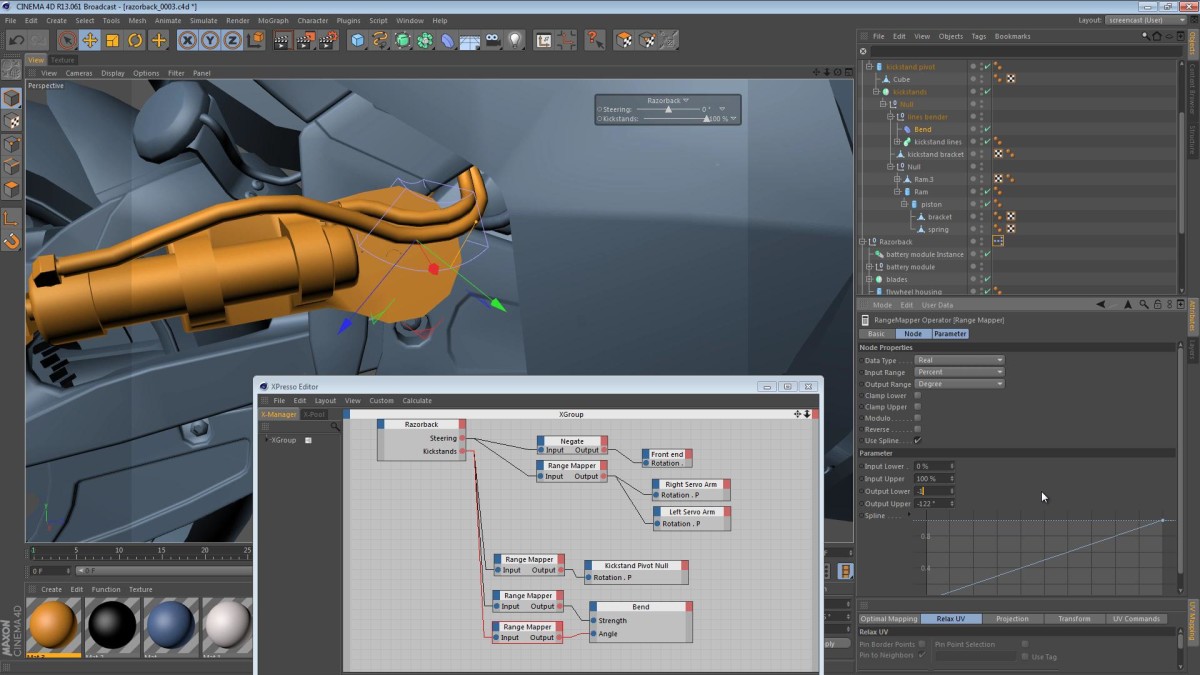
Having said all that, we need a way for the hoses to move and flex with the machine, and in this case advanced techniques such as Spline Dynamics or IK Chains seems too complicated. I’ve instead opted to use a simple bend deformer driven by an XPresso slider.