In this part, we take a look at the shape and mass of the robotic arms. The last video looked at the rough layout of the arms, just focusing on where they will fit, and how they will be able to articulate.
Covered in this Order Zyvox
- We start by looking at my other robotic arm and what characteristics we like in the design.
- One of the first things I do in this video is some cleanup of the object hierarchy (with a lot of keyboard tapping noise).
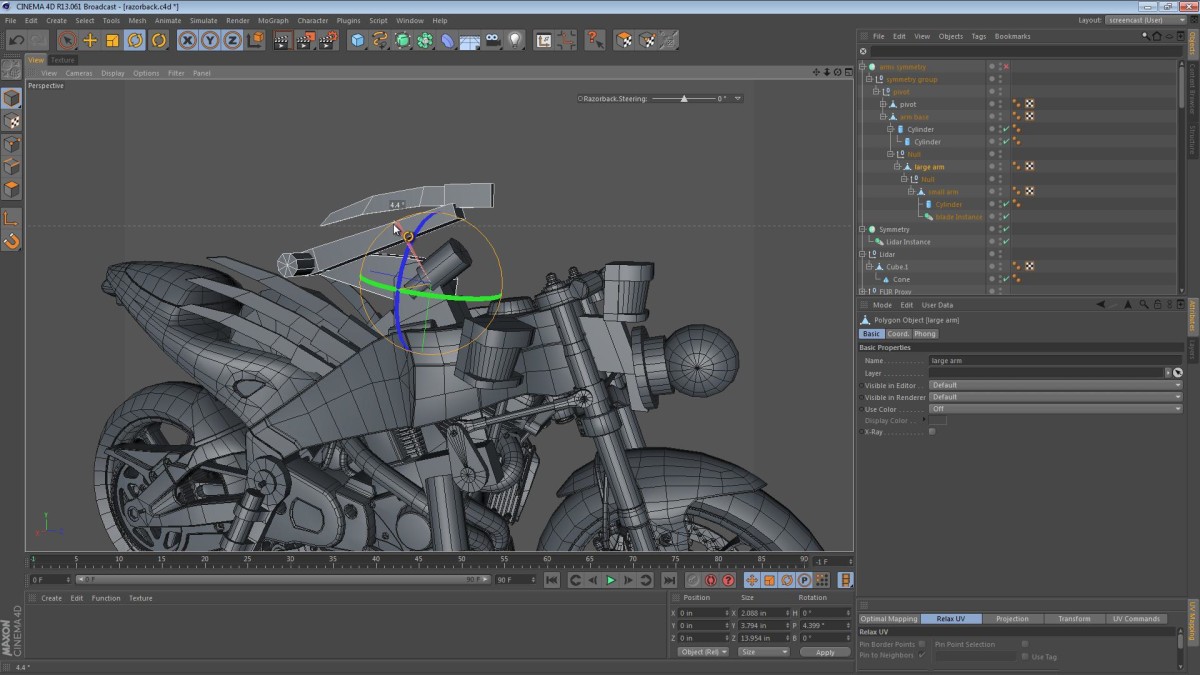
- We look at the main pivot point again and test the rotation clearance.
- The pivot point is given a rough shape as we model it and figure out what volume it should occupy.
- Re positioning of the blades.
- Shaping the large and small arm components.
- Creating a rough shape for the main arm’s motor. I think it will eventually be a focal point of the look and feel of the arms.
- We finish up by turning the symmetry object back on, and taking a look at how the arms are shaping up.
Loki Stormbringer
February 25, 2015 — 12:53 pm
Why do you think this?
As i see it, it’s ready to meet/meat The major 😉
Steve Langley
August 7, 2012 — 4:17 pm
Hey Jamie,
Thought i would give you a quick shout to say i am loving this Razorback series you are doing. I have ordered the book as it sounds interesting. Modelling isn’t my strong point so this is great but also to hear your thought process. I don’t think the length of your videos is a problem. If you’re interested then you will watch it. Looking forward to the next instalment and hoping to see you take this bike to a finished, textured, animated machine 🙂
Great work.
Jamie Hamel-Smith
August 7, 2012 — 9:04 pm
Thanks so very much for the feedback Steve. It’s great to know that you’re enjoying the series. The book is great too, a highly recommended read. My goal is one video per week, and I usually release one on Tuesday mornings, so it’s great to know I have a regular viewer.
Loki Stormbringer
February 22, 2015 — 1:00 pm
Hi,
I Know, i asked this already a few times, but could you leave a Download Link of The finished Model in The Description of The last youtube Tutorial?
Would be very nice 🙂
Have a nice day,
Loki
Jamie Hamel-Smith
February 24, 2015 — 8:22 pm
Sorry, I don’t feel like the model is ready for release yet.