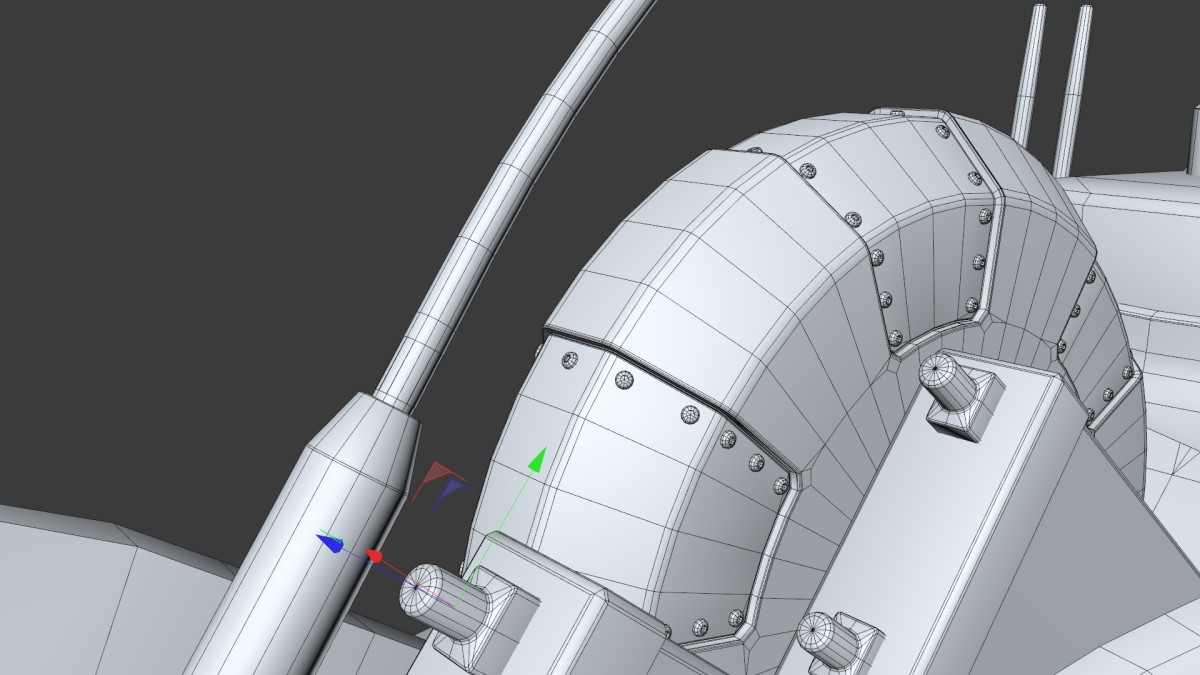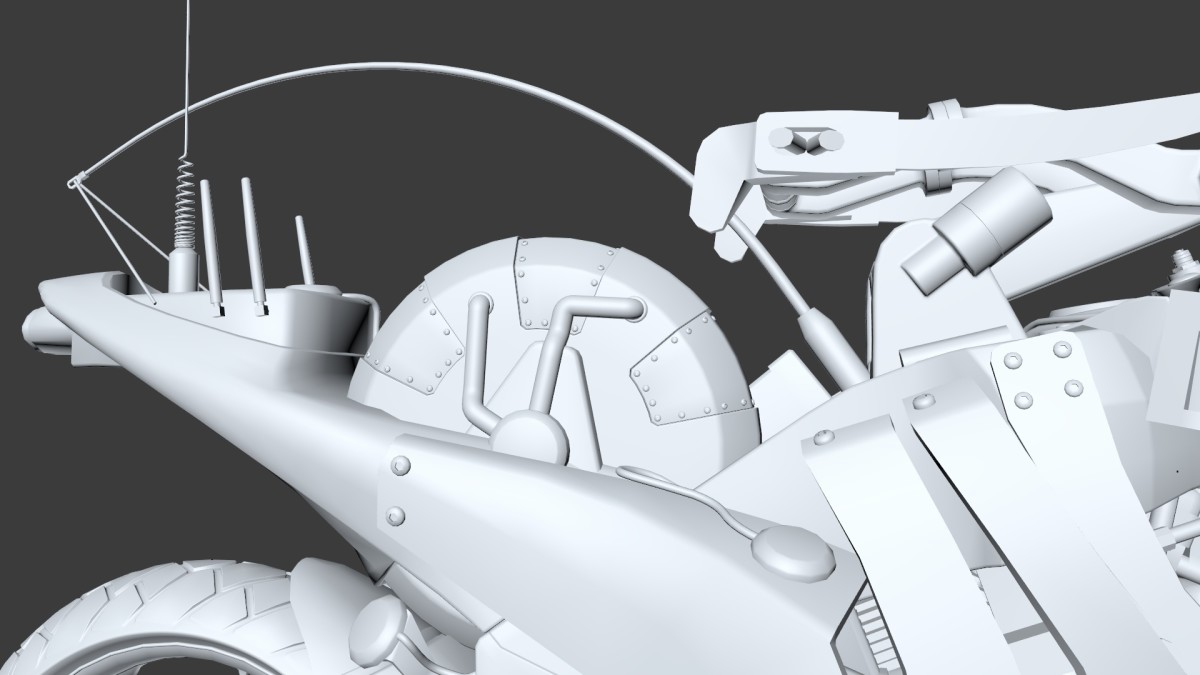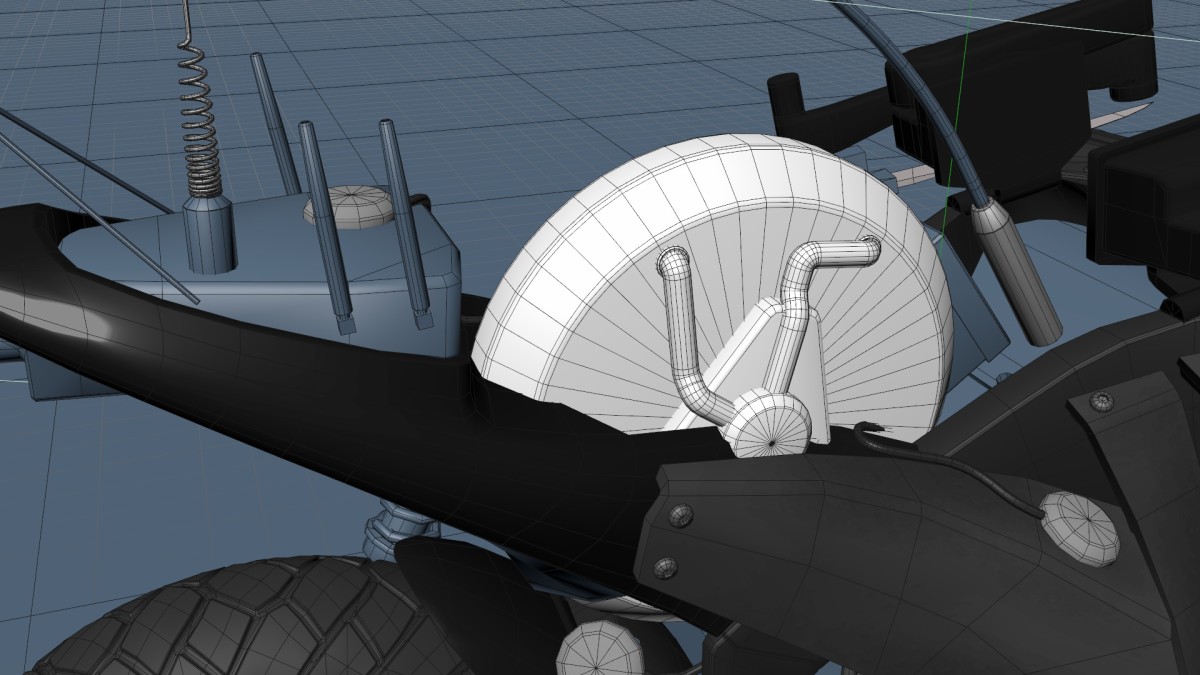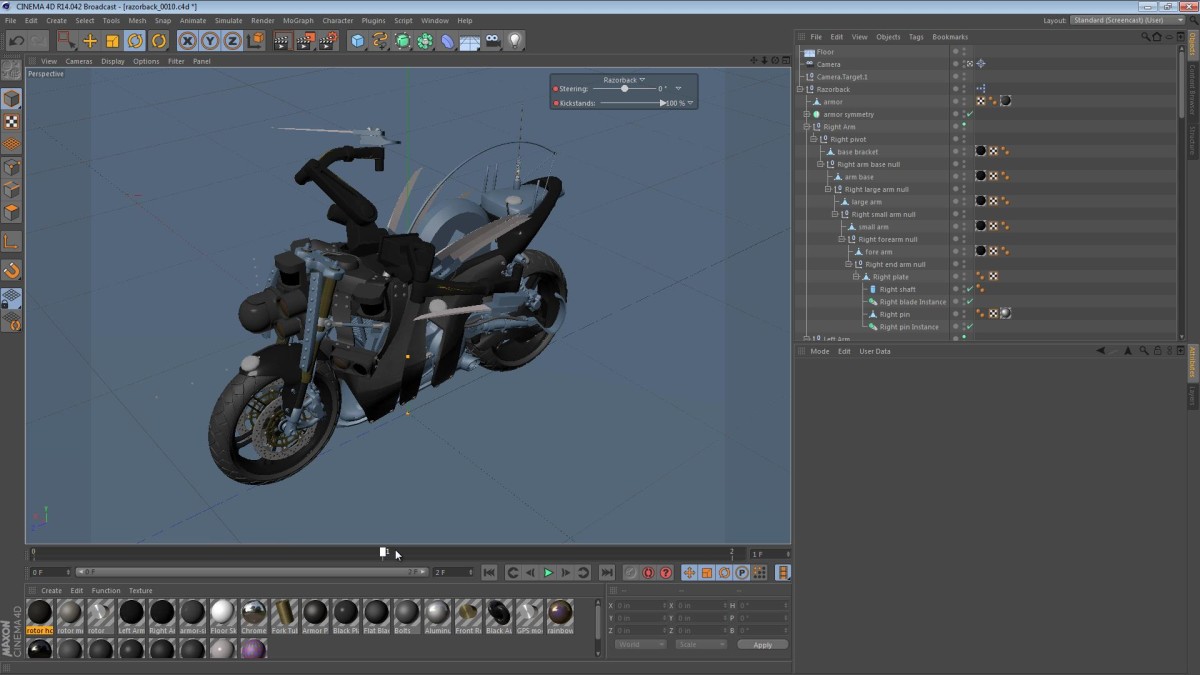
In the below video, we take a look at creating some battery cables using a few modeling techniques. The actual connector is created using some simple polygonal modeling, and the cable is created using a SweepNURBS object and a few deformers.
Head on past the break to see the video, and do let me know what you think of it.
Read More