In part 11 of the Razorback series, we start off by looking at the blades and the blade mounting system.
Covered in this video:
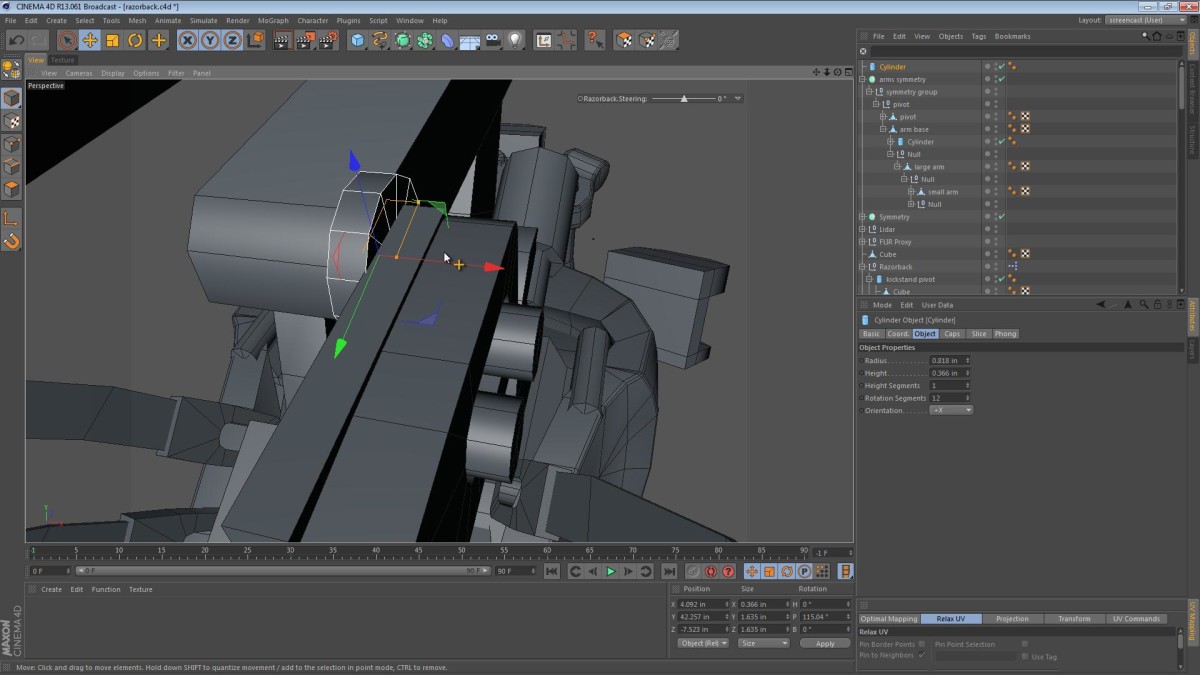
- Modeling the base of the blade (mounting point).
- Some simple modeling techniques using bevels, and keeping the geometry clean. We chat about using quads whenever possible.
- Creating the “pins” that grip the equipped blades. This is a rough idea and I have no clue if it’ll work in real life.
- Working out the motions that would need to be enacted in order to switch out blades. Just a quick test for peace of mind.
- Creating the plate that the blades mount to when they are equipped.
- Organizing the hierarchy for the robotic arm.