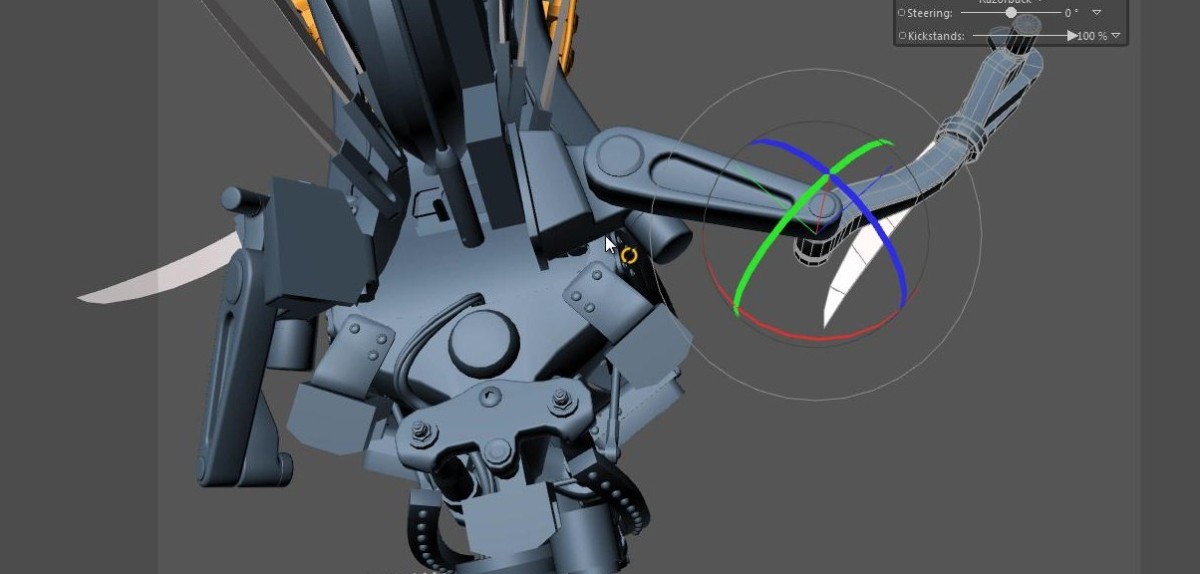
The robotic arms of the Razorback give it a lot of personality, while serving as its main focal point when regarding the high-tech sci-fi look of the machine. The arms have been built in the confines of a Symmetry object until this point, and that’s been helpful for staging and general modeling. At this point it becomes a bit of a hindrance however. In this video, we’ll take a look at how to easily duplicate the hierarchy of objects (arbitrary coordinates, instances, and all) to the other side of the machine. We also take a look at the blade restraining pins and a little reinforcement for the kickstand rams.
If you’re enjoying these videos, remember that you should share the entire Razorback series with anyone who might be interested.
Steve Langley
January 17, 2013 — 1:38 pm
Thanks Jamie, Lots of very useful subjects.
Jamie Hamel-Smith
January 20, 2013 — 8:04 pm
I’m glad you’re liking it 🙂