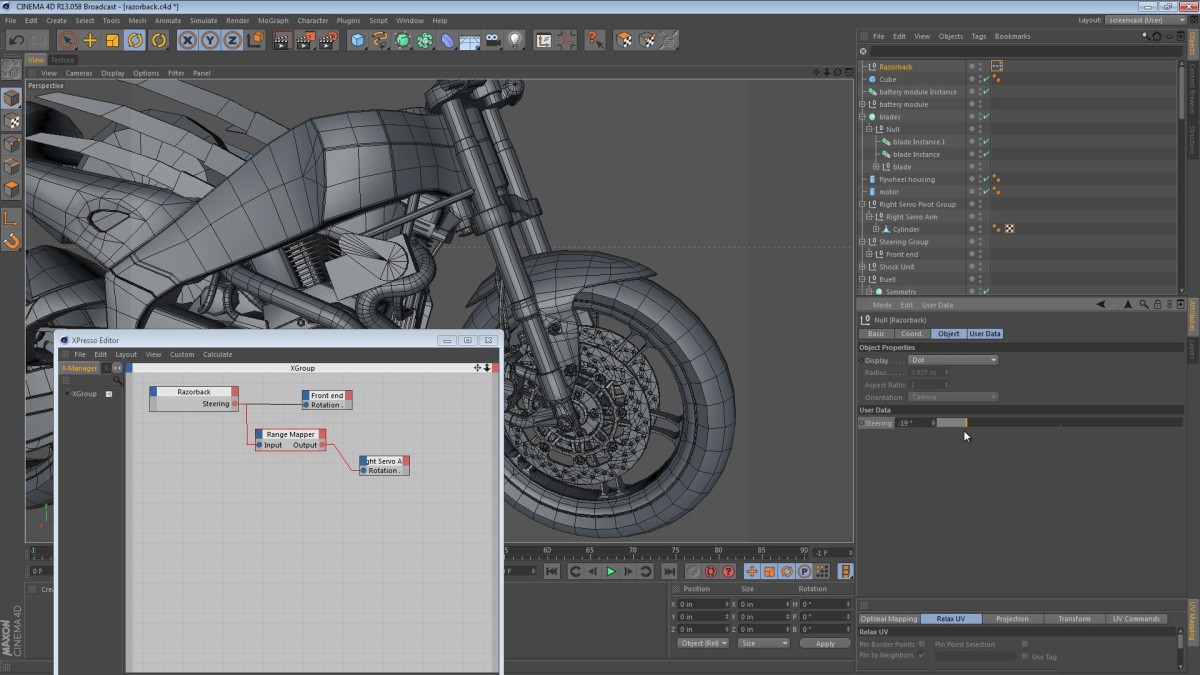
In this part of the Razorback series, we tackle the steering mechanism of the machine. I explore a bit of the setup necessary to make the steering work without a human involved and even get into some Xpresso.
You can see where I use a combination of the Target tag and the Xpresso Range Mapper node to get the desired effect of the servo steering system. Read on to see the video, and leave me a comment if you like what I’m doing with this project.
iSalaspro
July 1, 2012 — 10:42 pm
interesting tutorial