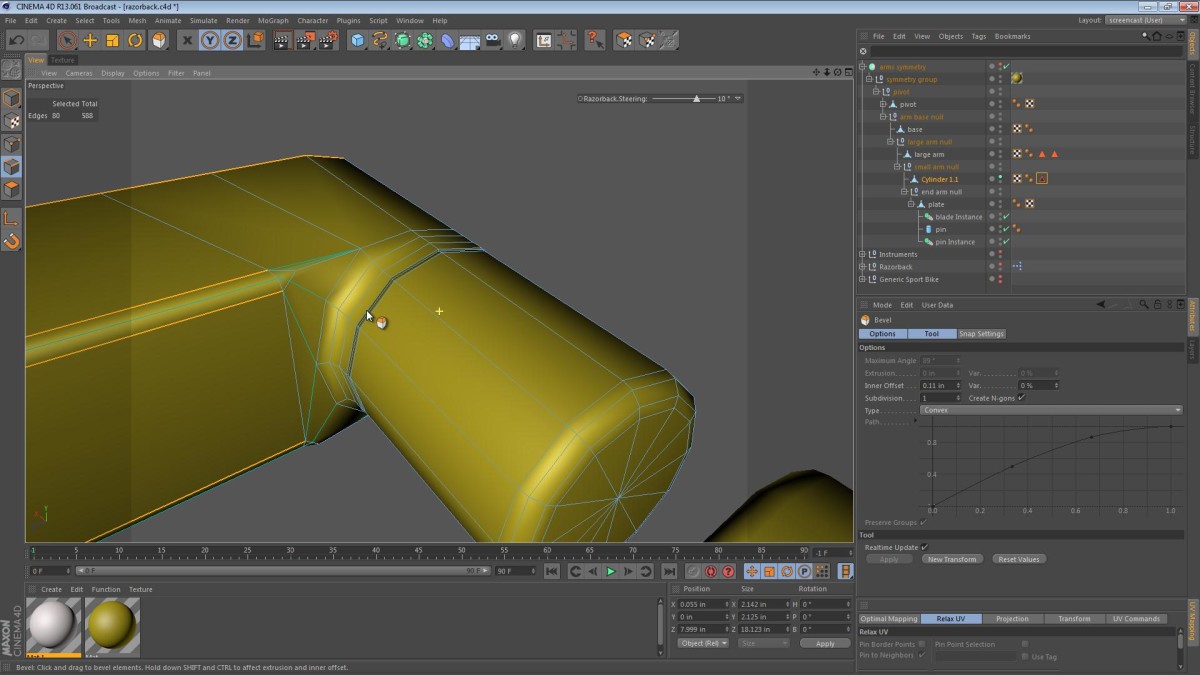
In part 19 of the Razorback screencast series, we use a Boolean operation to join now separate components of the upper arm to the rotating disc/bearing area that we’ve been calling the wrist. Keeping with the visual trend of the robotic arm up until this point, I blend the cylindrical part into the rectangular part of the arm. We’ve used this approach Read More
Tag: arm
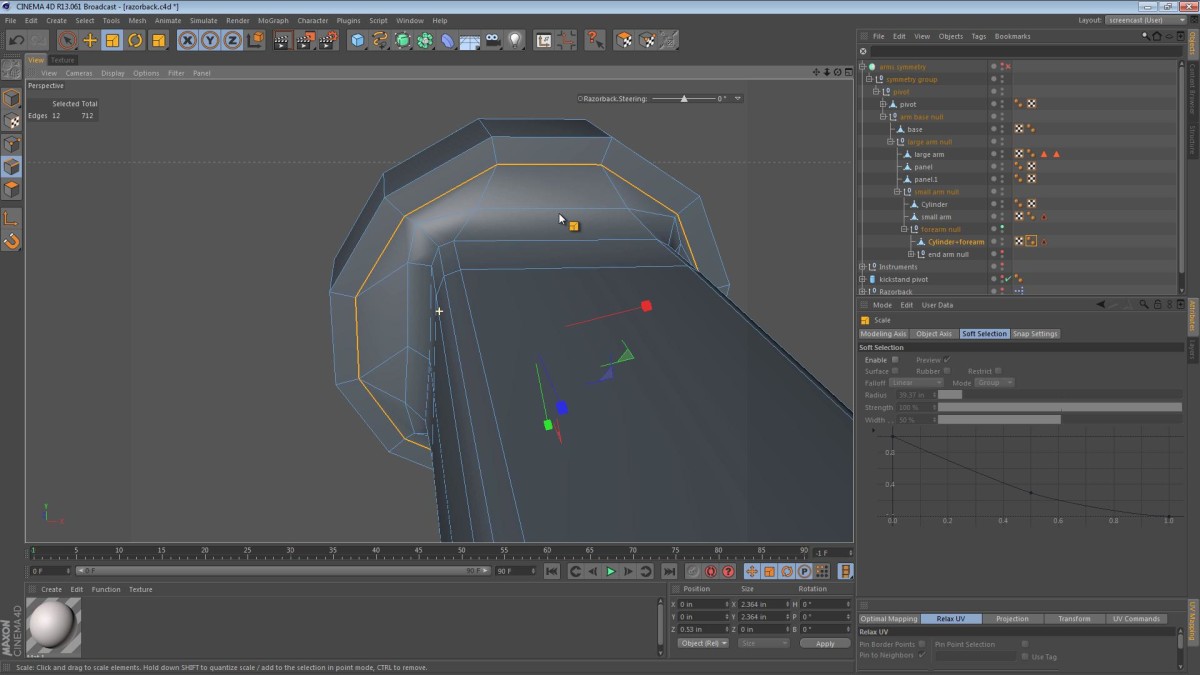
In this part of the Razorback series, we split the upper arm into two pieces. Earlier on in the series I wanted to keep the robotic arms as simple as possible, and while doing so, I unintentionally hampered the range of motion. The following video follows me as I try to correct this situation. The result is actually better looking in my opinion.
In this part of the Razorback series, we are going to revisit the Pneumatic kickstands. First, we take a second look at the upper robotic arm and make some pretty dramatic tweaks.
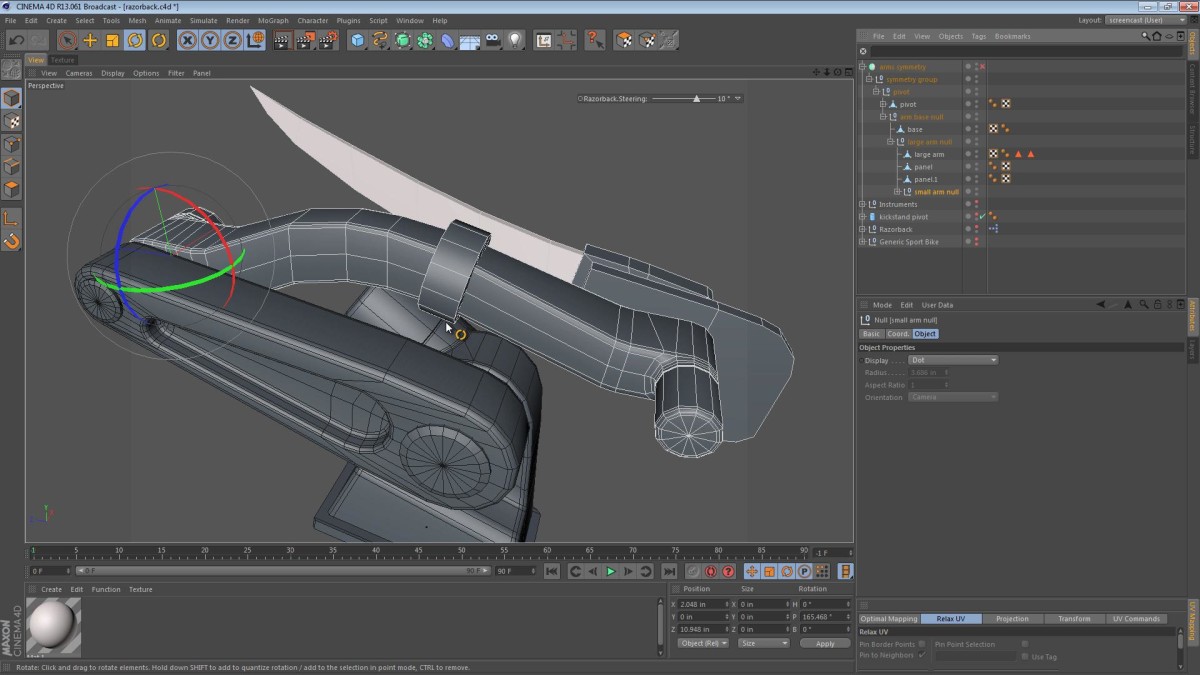
In this installment of the Razorback screencast, we kick things off by reconstructing the upper robotic arm of the machine. There’s a bit of modeling, and some new techniques in store for you.
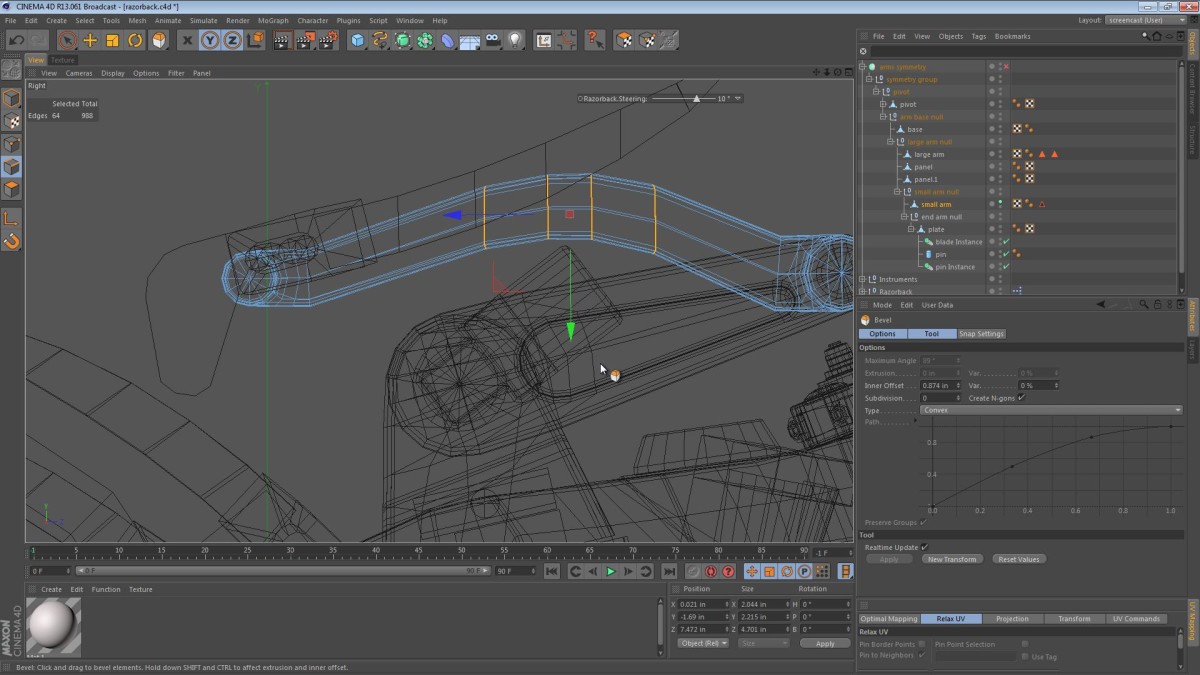
In this part of the series, we continue refining one of the robotic arms, in an effort to make the Razorback’s arms more polished and complete.
Most of the video is spent cleaning up geometry and beveling edges to create smooth transitions.