In this part of the Razorback series, we split the upper arm into two pieces. Earlier on in the series I wanted to keep the robotic arms as simple as possible, and while doing so, I unintentionally hampered the range of motion. The following video follows me as I try to correct this situation. The result is actually better looking in my opinion.
Covered in this video:
- We do a few tests for the limitations that are already in place. For example, what happens when we spin the blade around?
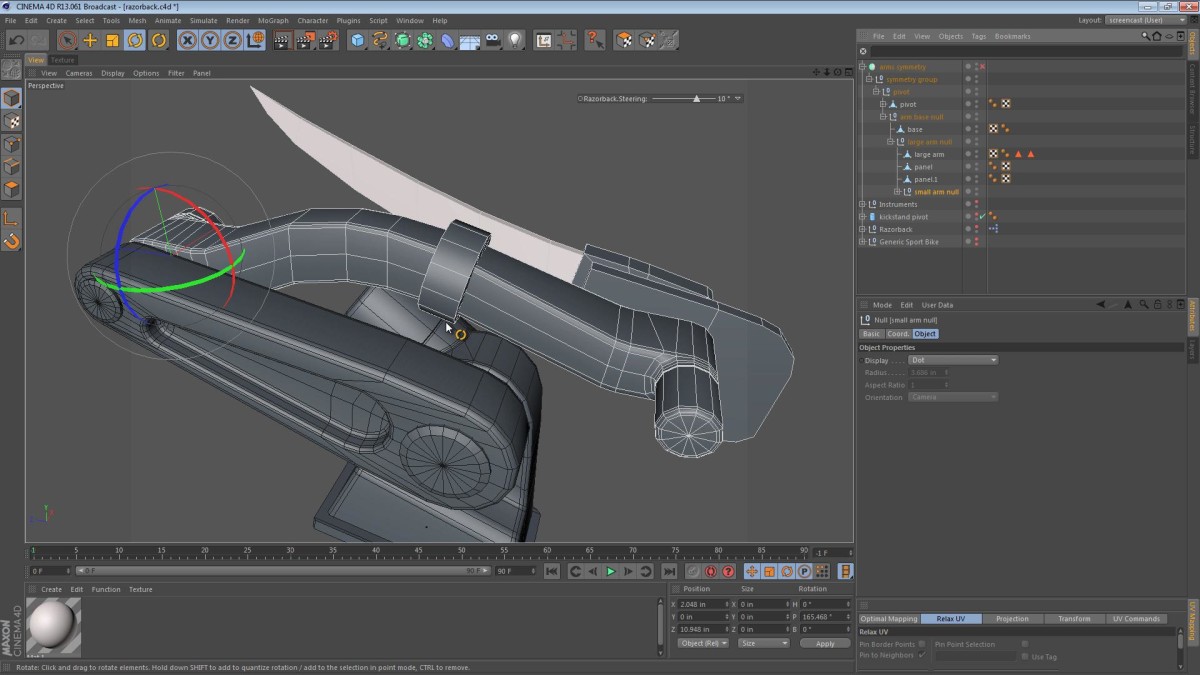
- At around six minutes in, we create a visual aid and starter object where we will cut the arm and add the “wrist” pivot.
- Near the eleven and a half-minute mark, we prepare the existing arm geometry for the cut.
- Later on, we rearrange the hierarchy a bit so the upper arm now moves as two separate parts.