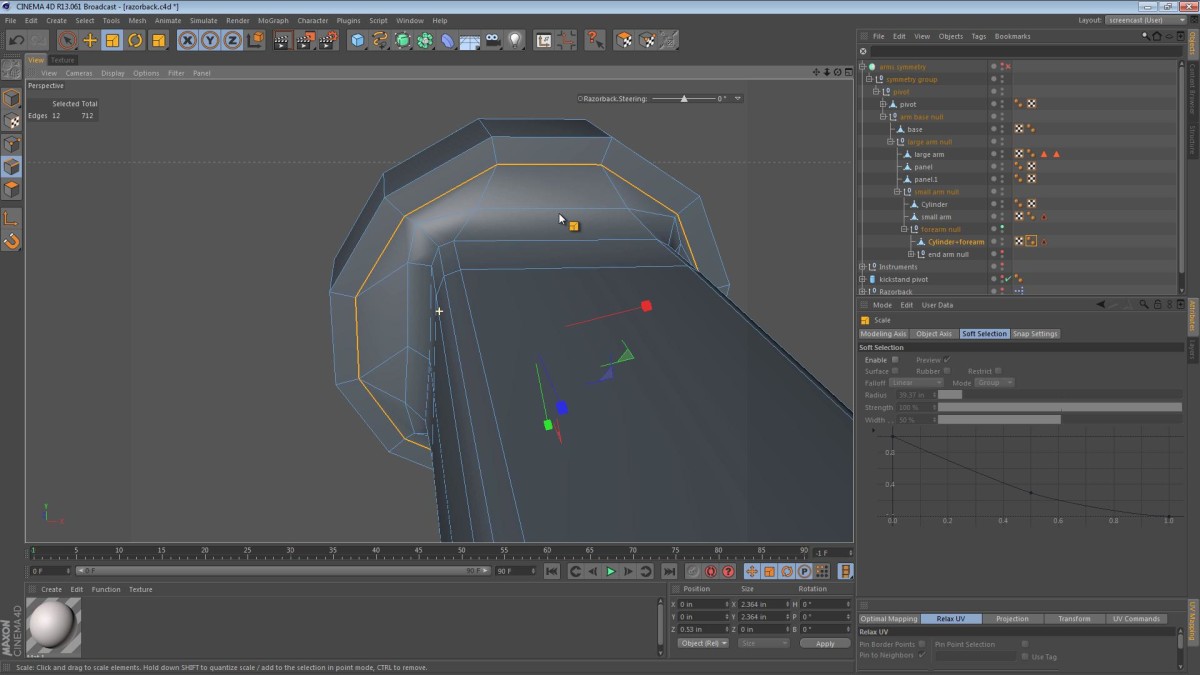
In part 19 of the Razorback screencast series, we use a Boolean operation to join now separate components of the upper arm to the rotating disc/bearing area that we’ve been calling the wrist. Keeping with the visual trend of the robotic arm up until this point, I blend the cylindrical part into the rectangular part of the arm. We’ve used this approach before in the earlier parts of the series where we refine the edges and intersections of the robotic arm. The below video just takes us through more of the same, albeit with a sightly different set of constraints and challenges.
If you’re interested in seeing me join the other half of the arm to the pivot (the bit that I didn’t do in the video above), then check out the Part 19 Addendum video on YouTube. It’s sped up by 1.5x and has no audio, but it’s a quick way to “finish” watching the above video.