In this part of the Razorback series, we are going to revisit the Pneumatic kickstands. First, we take a second look at the upper robotic arm and make some pretty dramatic tweaks.
Covered in this video:
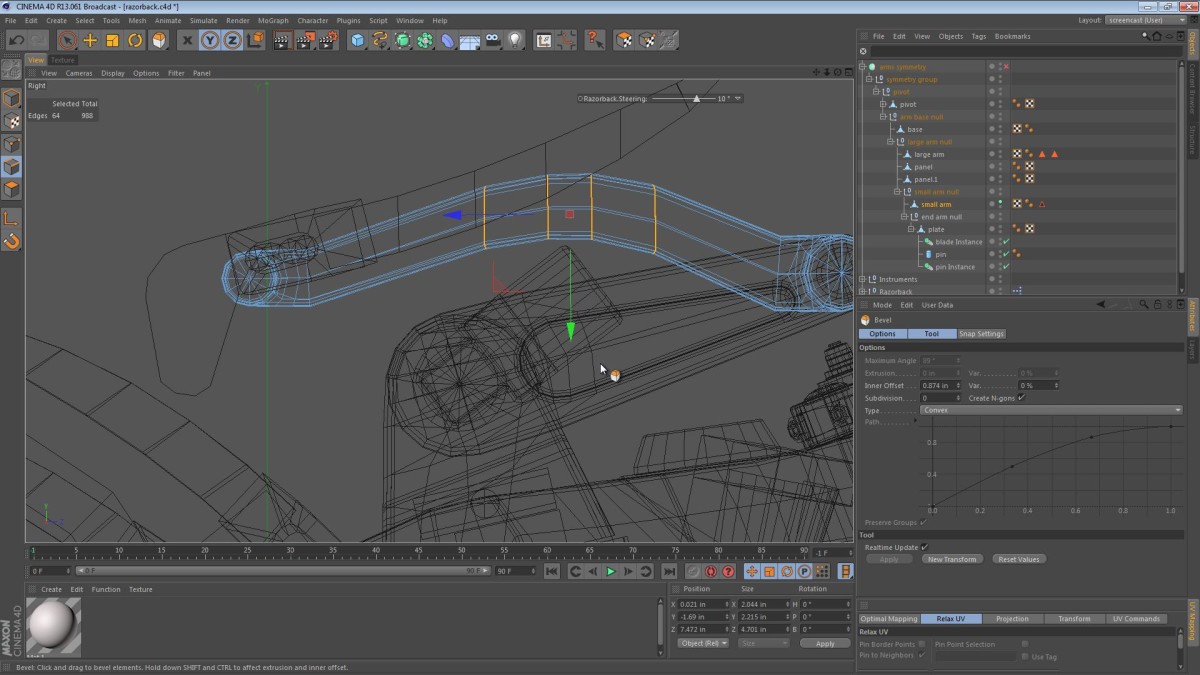
- A quick review of the geometry and topology of the upper robotic arm.
- The addition of a couple access panel proxy objects to the lower robotic arm.
- Bending the upper robotic arm so it clears the motor protrusion on the base of the arm assembly. This is a fun process as it gives us the opportunity to introduce some style.
- Revisiting the “Medieval” looking Pneumatic kickstands and turning them from a pirate-like peg-leg into a more high tech composite spring. My inspiration comes from the prosthetic leg that amputee athletes sometimes use in competition.
- Once we’ve created the new kickstand-spring, we play with a Bend Deformer a little bit and see what the spring would look like under compression if animated—a nice little distraction to break up the monotony of modeling.
This video is a long one, and focuses on the arms and kickstands. Perhaps the next video will be shorter and focus on the armor or other sensors.