The eyes of the Razorback are going to be comprised of a combination of LIDAR (Light Detection And Ranging [basically a type of 3D scanning]) and FLIR (Forward looking infrared). This instrument array is pretty ad-hoc as the novel doesn’t talk too much about the look of them.
Covered in this video:
- Preparing the bracket for the instruments and examining some reference material.
- Creating some proxy objects for the FLIR turret and the LIDAR units.
- Looking at the steering clearance as an example of adaptive modeling. Essentially, if it doesn’t fit, then we try to make it fit.
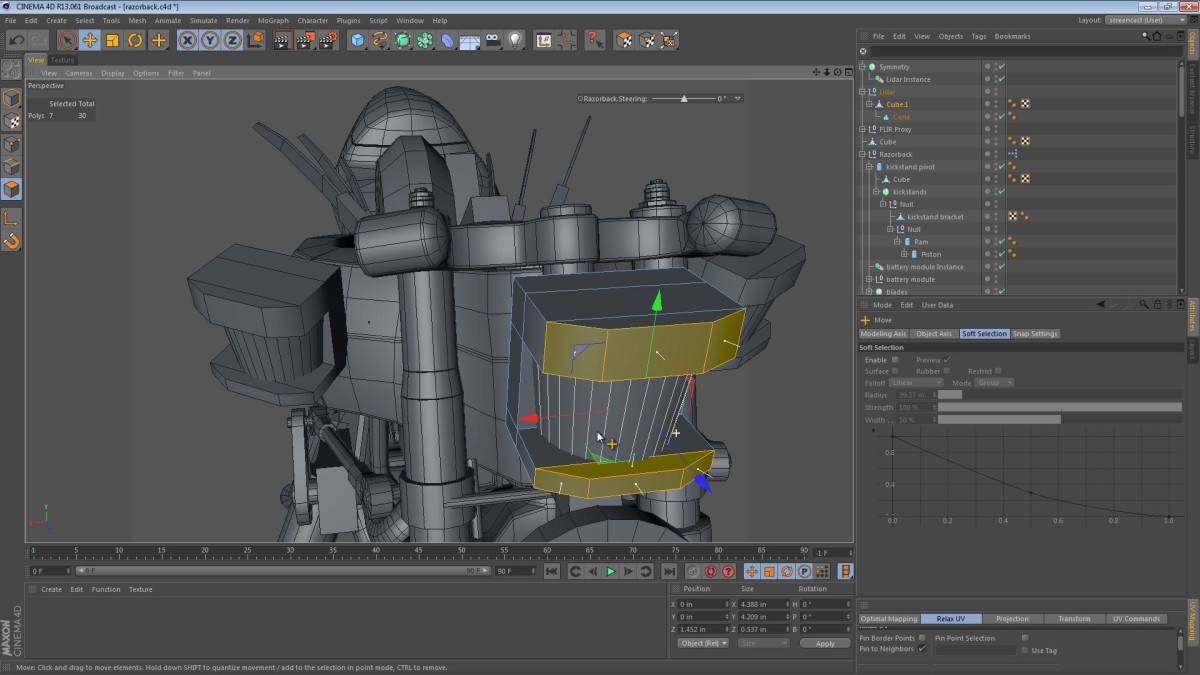
- Deriving the geometry for the LIDAR lenses from the primitives of the existing LIDAR blocks.
- Using the Cinema 4D Cone primitive with one of its extra options top radius.
At the end of this video, I didn’t feel great about the look and feel of the FLIR turret. I’m sure I’ll be doing some more work on that unit to make it look a bit more dangerous in the future.
DroehnIng
June 2, 2014 — 11:05 pm
Ahw … the mountings for the handle bars would have been perfect for the
outer LIDAR devices so their FOV would follow the steering. just throwing
that out here while going down the playlist ;)
cncotomasyon
May 31, 2014 — 11:58 am
Thanks.