
Check out Jason’s latest post on the digital-telepathy blog. It’s not 3D related, but it’s a great read nonetheless.
Check out Jason’s latest post on the digital-telepathy blog. It’s not 3D related, but it’s a great read nonetheless.
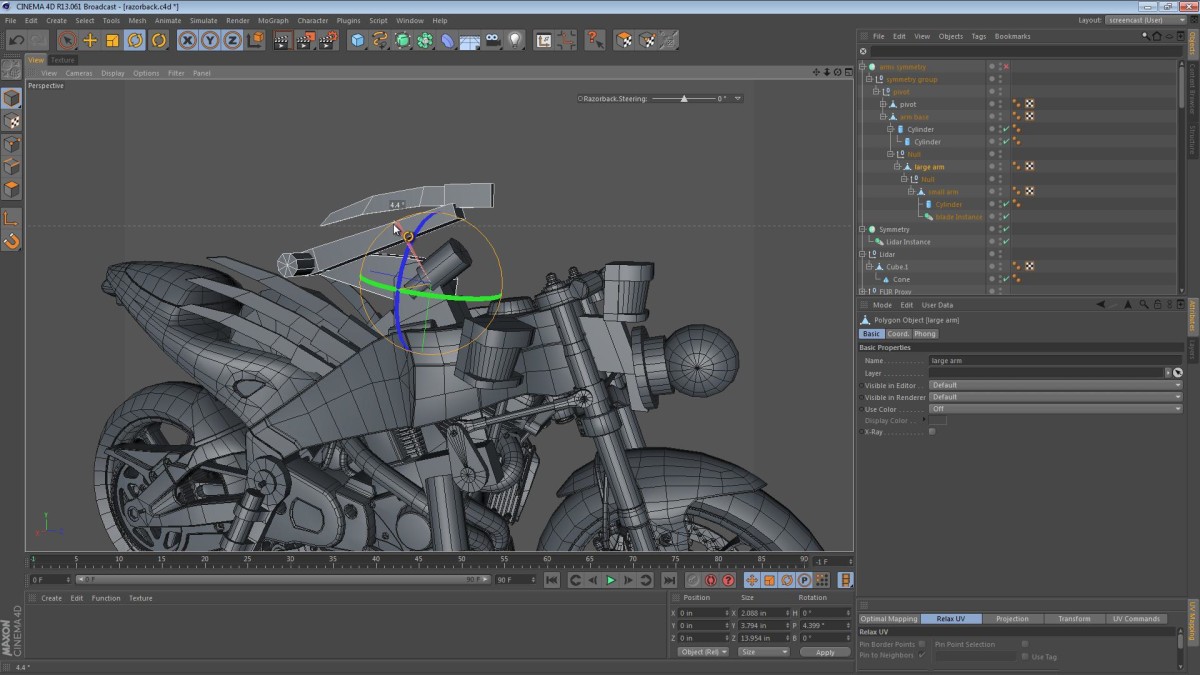
In this part of the Razorback series, we are going to revisit the Pneumatic kickstands. First, we take a second look at the upper robotic arm and make some pretty dramatic tweaks.
This Five Minute Tip is the inaugural tip and reflects on a video I saw on Greyscale Gorilla a while ago. It uses the Cinema 4D Connect Object to join tow different parts of one object or two completely separate objects. Read on for the video and some more info about the tip.
Read More

When arriving home from work this week, I spotted a dry patch of dirt. It was cracked, and had a dark spot in the center. I was instantly struck with the inspiration to create a simple clay pot with the dirt I saw, and a vine growing from the crack.
The video below is sped up and shows the process I used to create this simple scene. You can also download the Cinema 4D scene file. It should open in versions 12–14. You should read on for the video and the download. Read More
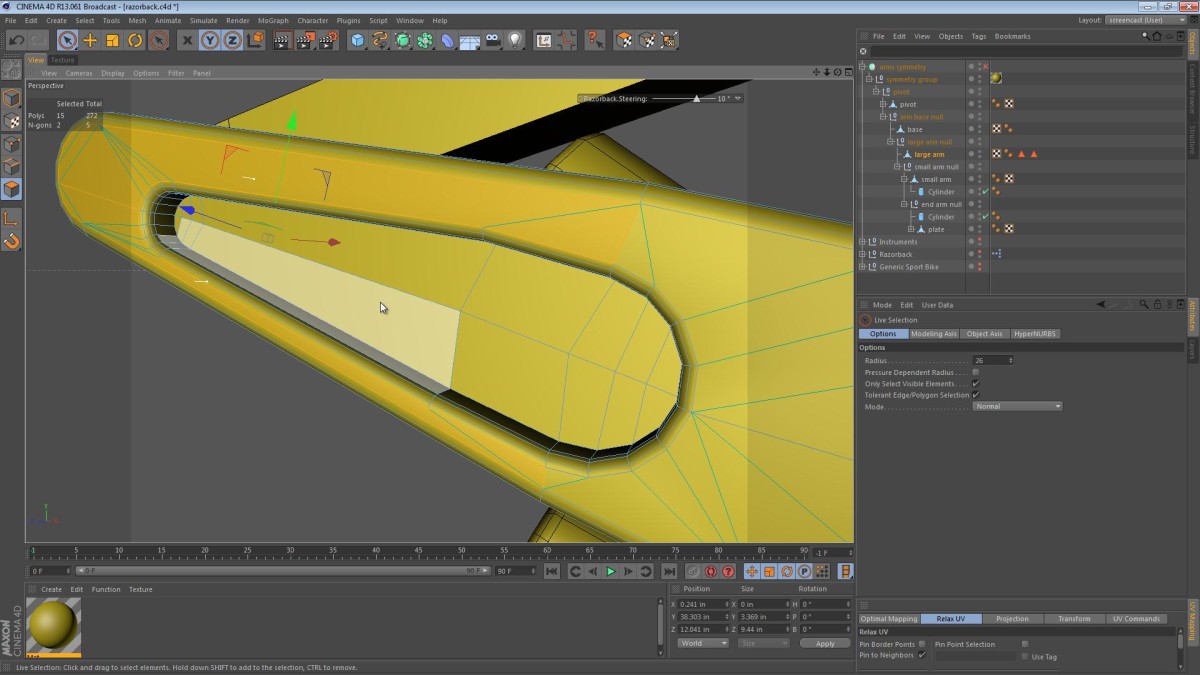
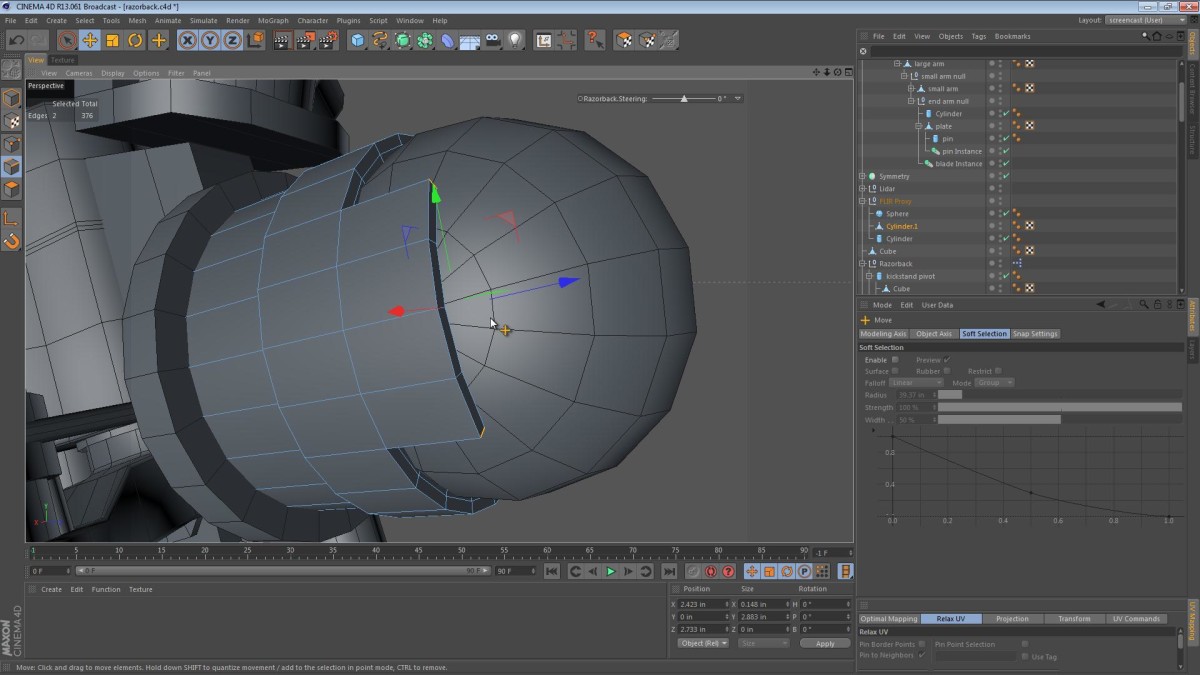
In this installment of the Razorback screencast, we kick things off by reconstructing the upper robotic arm of the machine. There’s a bit of modeling, and some new techniques in store for you.
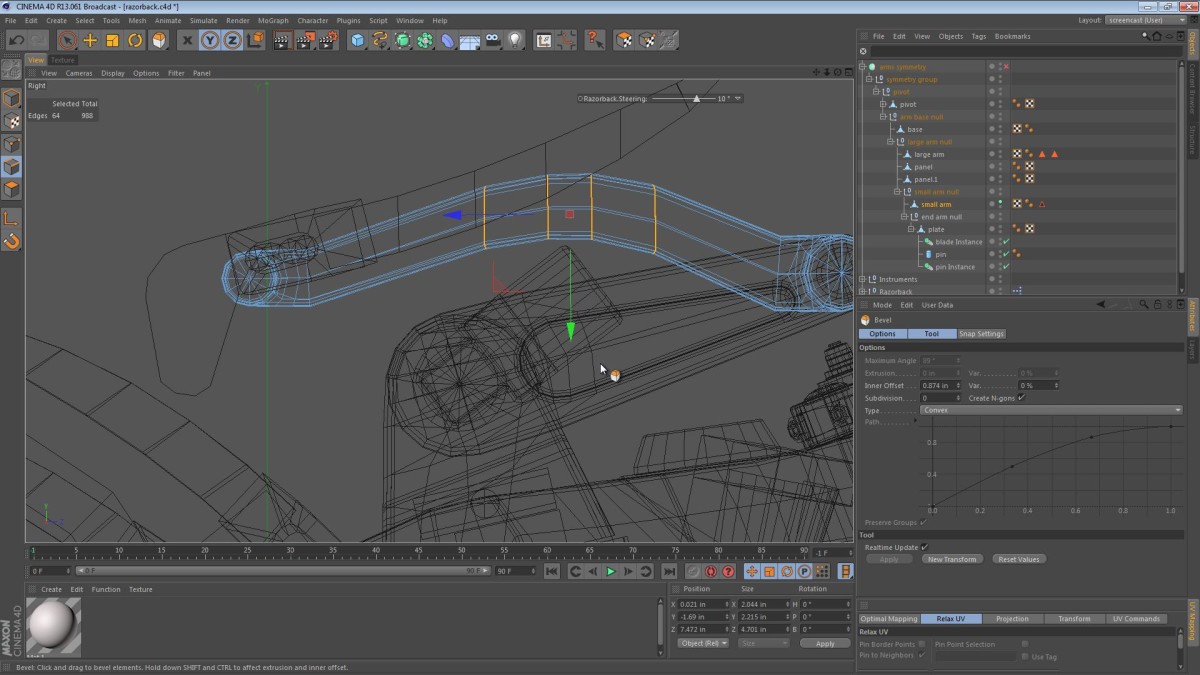
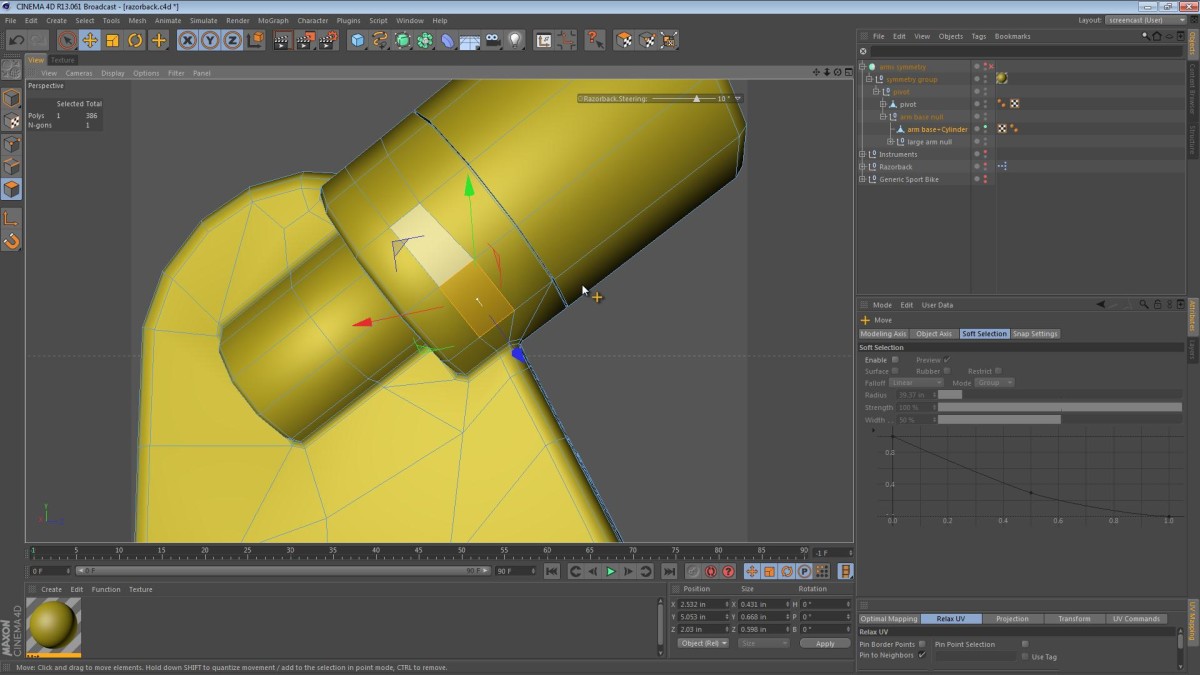
In this part of the series, we continue refining one of the robotic arms, in an effort to make the Razorback’s arms more polished and complete.
Most of the video is spent cleaning up geometry and beveling edges to create smooth transitions.
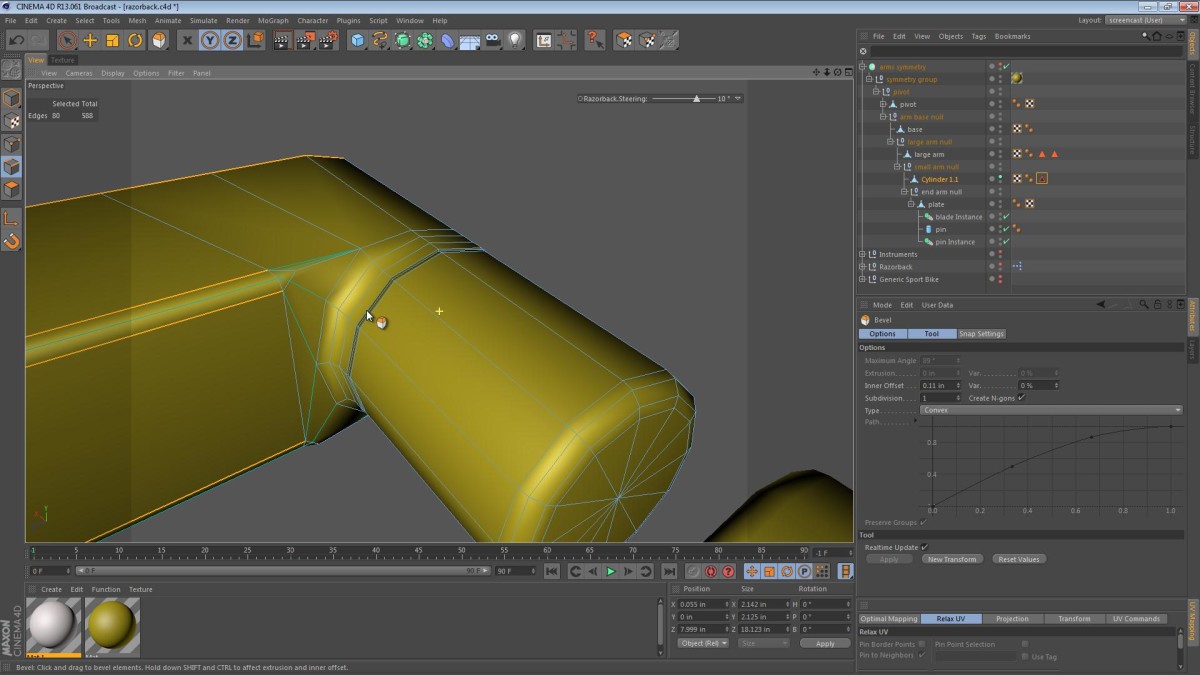
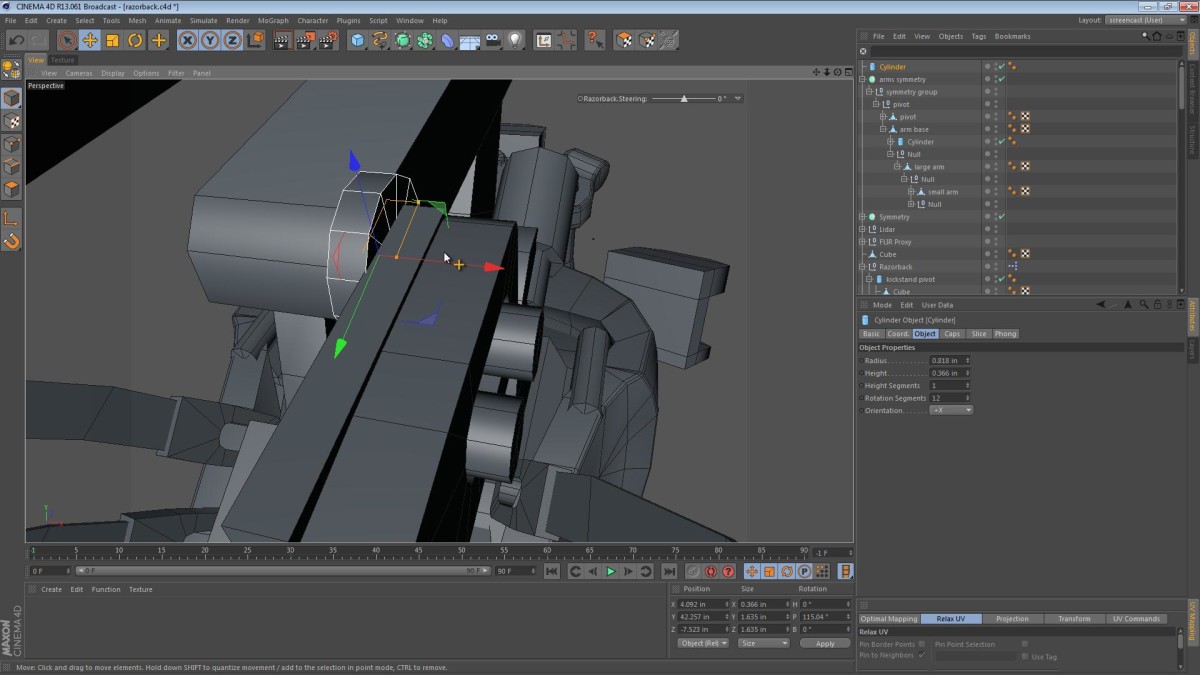
In this part of the video series, we start to give some attention to areas of the model that are still very primitive. I kick things off by refining, smoothing and merging the base of the robotic arms. The base part of the arm has a motor mount fused to the housing as if it were cast from a single mold.
We start by merging the objects, giving it a yellow color and running through some Boolean techniques that may sound familiar if you saw my recent videos on Booleans in Cinema 4D.
I realize that at this stage of the modeling process, I may be making Purchase Desyrel words like: Boolean-ing and Boolean-ed… I’m OK with that. If we can Google something, then I can consider something Booleaned.
One of my WordPress Plugins; Fluid Video Embeds just got a minor update. The plugin works by wrapping YouTube and Vimeo videos in some nifty HTML markup that makes them fluid (stretchy, 100% width, elastic, etc.) Read More
I don’t practice using the MoGraph module enough, and this video proves it.
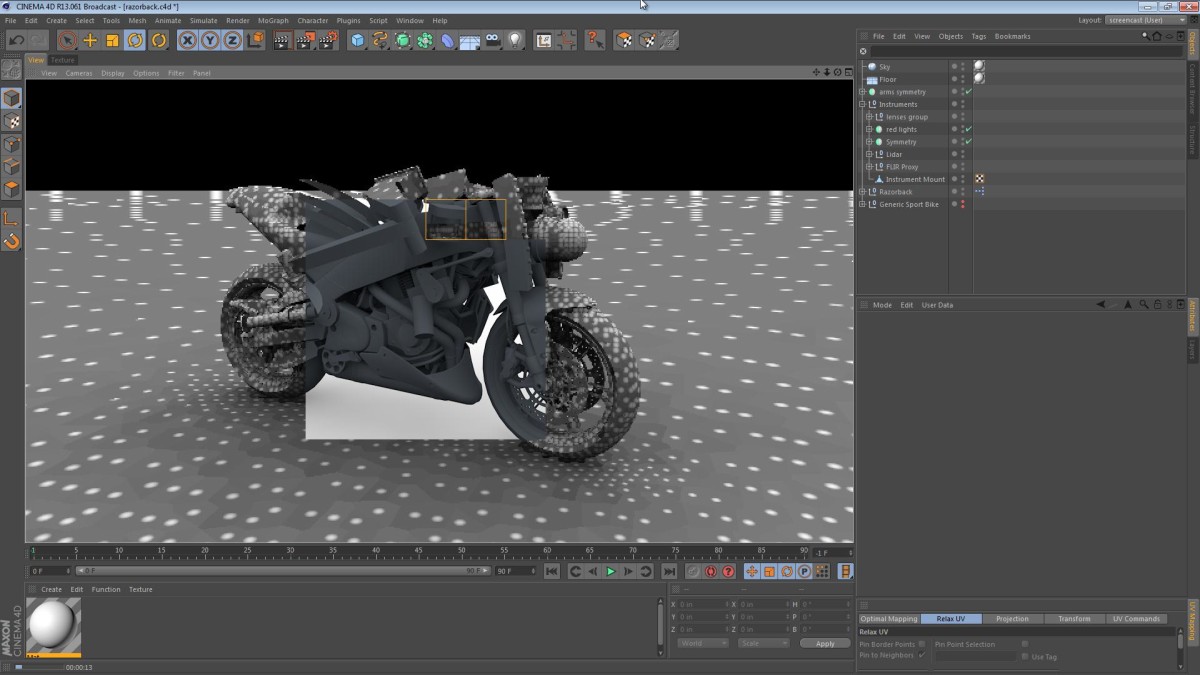
We start this video on a critical note as I realize that I’m still not happy with the instrumentation cluster on the front of the machine.
At the end of the video, there’s a test render with some simple Global Illumination.
In part 12 of the Razorback series, we take a look at the blade disposal system and the instrumentation array. The instruments are the Razorback’s eyes and ears. This array of optics and other sensors will allow the machine to move through the environment.
In part 11 of the Razorback series, we start off by looking at the blades and the blade mounting system.
In this part, we take a look at the shape and mass of the robotic arms. The last video looked at the rough layout of the arms, just focusing on where they will fit, and how they will be able to articulate.